
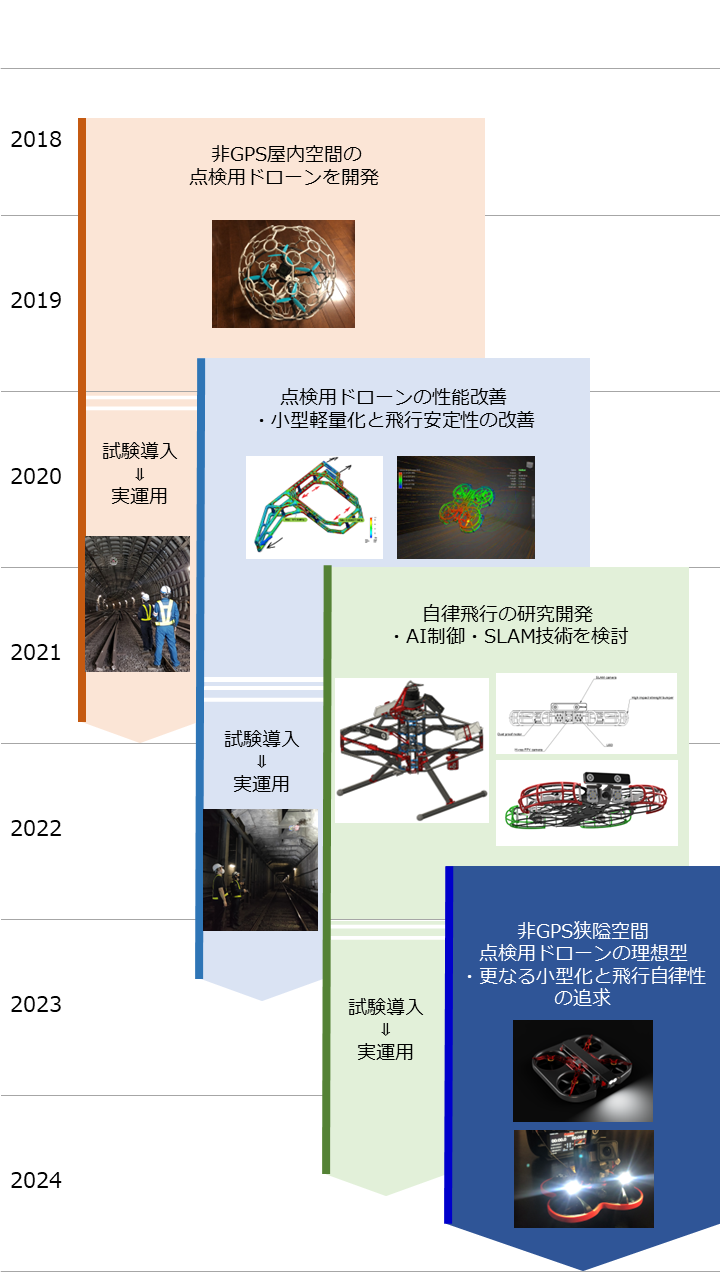
機体開発の変遷
2019年
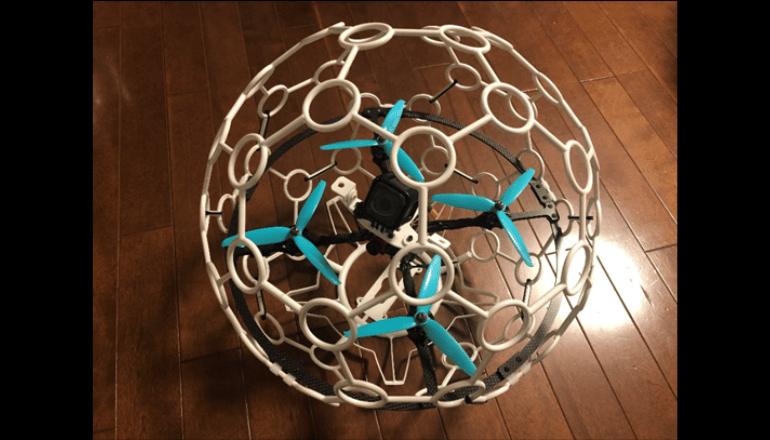
球殻ドローンの開発
2020年
DK-1 mk1開発
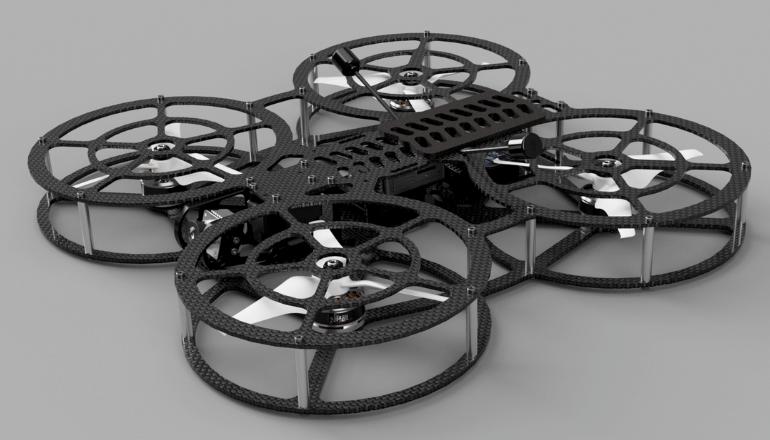
DK-1 mk2開発

2021年
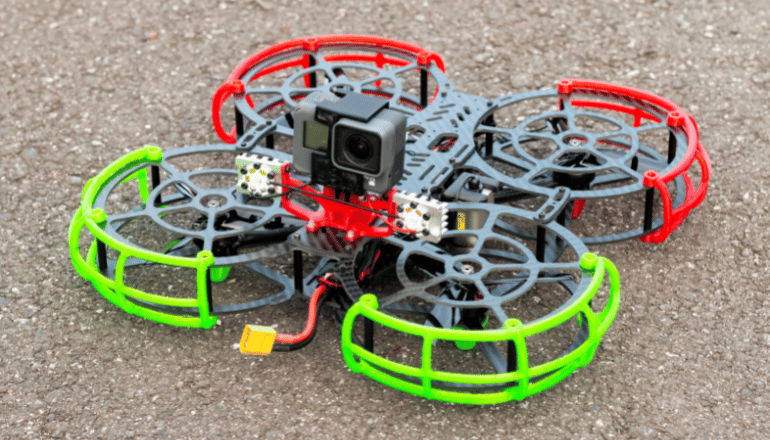
DK-1 mk3開発
2022年
JP-1@Smart Whoop開発
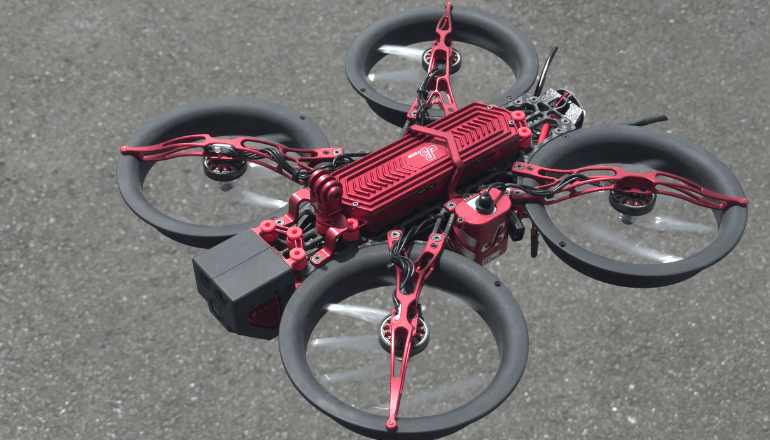
JP-1rev2開発

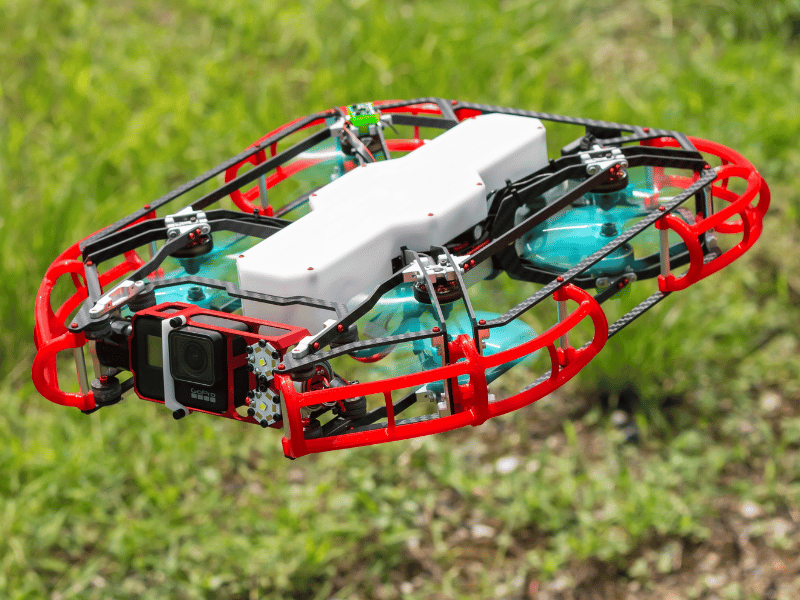
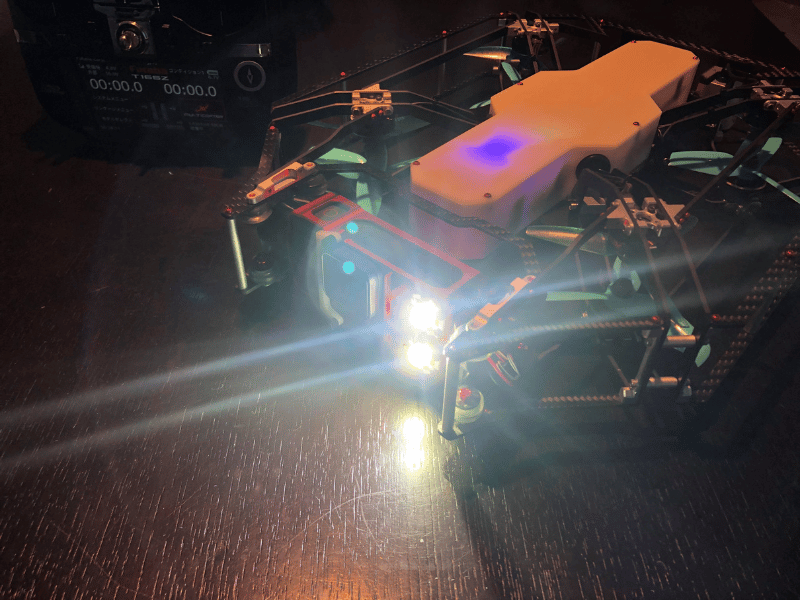
2023年
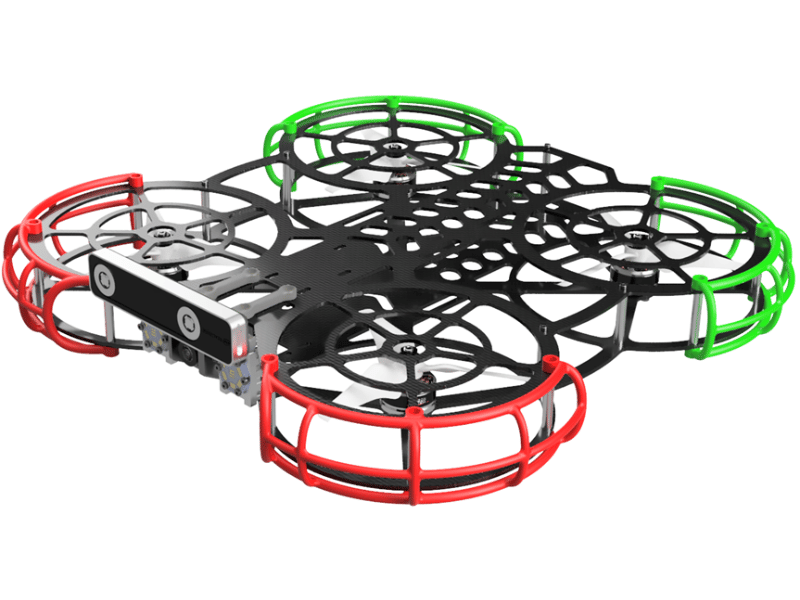
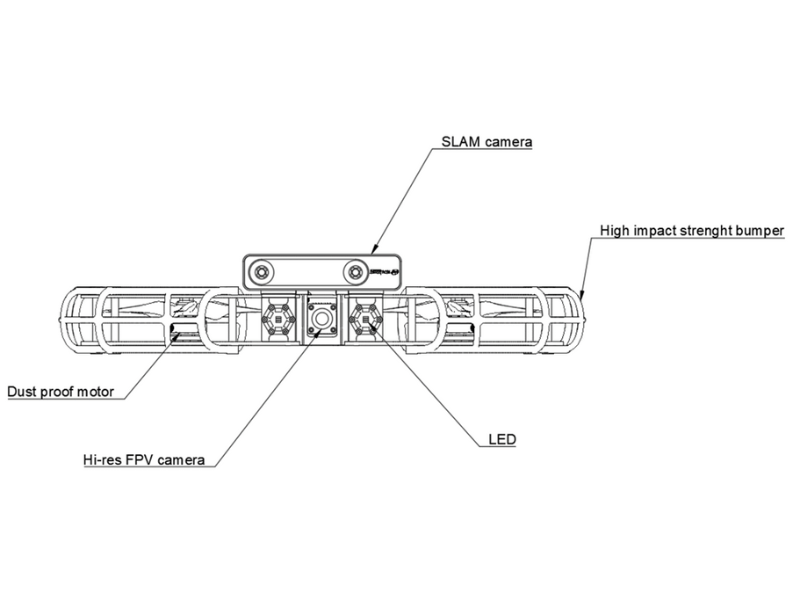
EP-1

技術開発の変遷
要素技術開発
飛行安定性・フェールセーフ技術
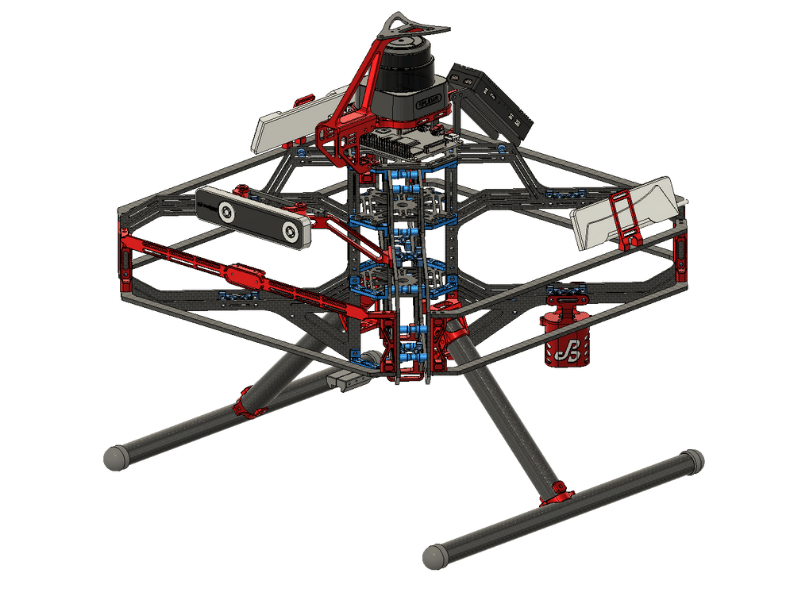
試作機「JP-0」の開発
- オクタコプターの検証
フェールセーフ:モーター1つ停止しても継続飛行可能
上下のモーター・プロペラ組合せ違いによる飛行時間最適化の検証 - 1軸ジンバルの検証
SLAM技術
DK-1 SLAMの開発と検証
- ポジションホールド機能実装
- Intel T265による自己位置推定を検討
コードネーム:EVEの開発と検証
- Intel T265による自己位置推定の検証
- 2D Lidarによる障害物検知、一定距離保持の検証

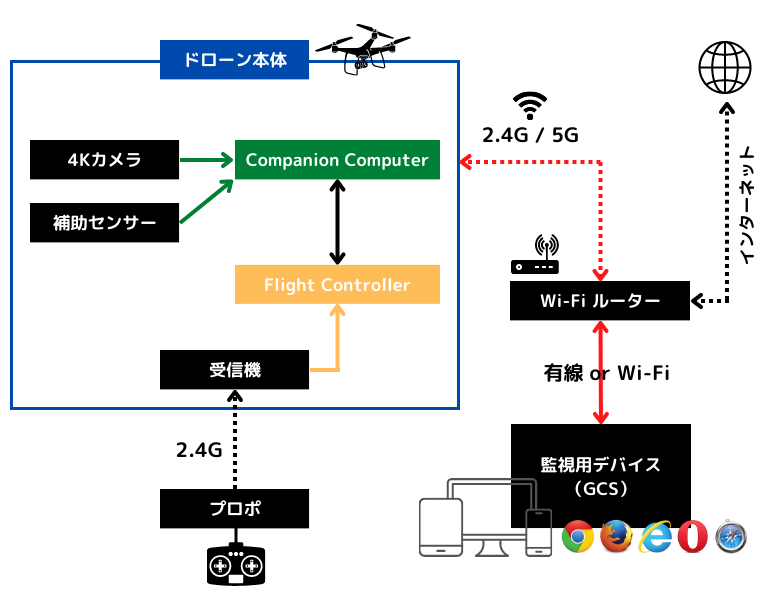
システム構成
マニュアル飛行時
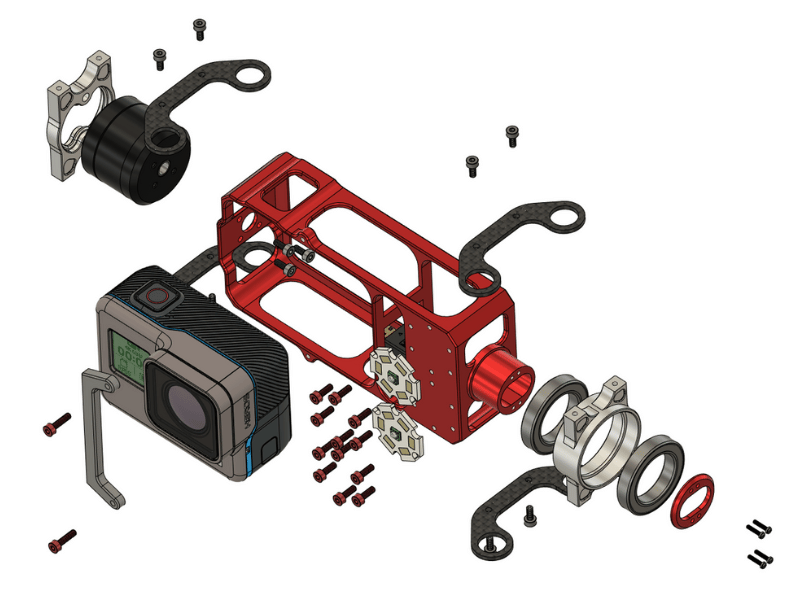
フレーム開発
EP-1

